The ability to separate targets from one another is a crucial aspect of radar systems and is called radar resolution. However, this should not be confused with the measurement accuracy of a radar. Radar resolution describes the ability of a radar to separate objects, whereas measurement accuracy indicates how precisely a parameter such as speed, distance or angle can be measured.In this article, we will look at the various parameters that a radar system can measure and then dive deeper into the different radar systems and their ability to separate objects.
The ability to distinguish between targets is a critical aspect of radar systems, termed as radar resolution. However, it’s important not to confuse this with the measurement accuracy of a radar. Radar resolution pertains to a radar’s capability to differentiate between objects, whereas measurement accuracy specifies how precisely parameters like speed, distance, or angle can be measured.
In this article, we will explore the diverse parameters that radar systems can measure and subsequently delve into the distinct capabilities of various radar systems in terms of object separation.
Measurable parameters with radar
Radar sensors emit electromagnetic waves to scan the environment. Objects within the antenna beam reflect these waves, which are then received by the radar sensor. The ability to measure various object parameters depends on the modulation type, as well as the number and arrangement of transmitting and receiving antennas. The object parameters that can be measured include:
- Velocity (speed and direction)
- Distance
- Angle (horizontal and vertical)
Modern radar systems operate with multiple transmit and receiving channels, employing advanced modulation schemes. This not only allows for the measurement of the parameters mentioned above but also enables the separation of objects based on velocity, distance, and angle. These advanced systems can generate a dense point cloud of the surrounding environment, earning them the designation of 4D or imaging radars. Moreover, leveraging modern digital signal processing or machine learning algorithms unlocks the potential to extract additional information, such as object classification, vital signs, and object path histories, from radar data.
Types of modulation vs. object separation
There are three common types of radar modulations used by RFbeam (CW, FSK, and FMCW), each primarily differing in the data that can be measured. Continuous Wave (CW) is the simplest, functioning at a fixed frequency and is not truly a modulation. Frequency Shift Keying (FSK) employs square wave modulation to transition between two frequencies. Frequency Modulated Continuous Wave (FMCW) utilizes continuous frequency sweeps with a triangle or sawtooth modulation across a defined bandwidth.
Modern radars have advanced capabilities, allowing them to generate fast multi-chirp FMCW sawtooth ramps. This combines the functionalities of distance and velocity measurement and object separation.
|
Measurement vs. modulation
|
CW
|
FSK
|
FMCW sawtooth
|
FMCW triangle
|
FMCW fast chirp
|
|||
|---|---|---|---|---|---|---|---|---|
|
Velocity (Speed and direction)
|
|
|
|
|
|
|||
|
Distance of moving objects
|
|
|
|
|
|
|||
|
Distance of static objects
|
|
|
|
|
|
|||
However, caution is advised when dealing with object separation. The capability to accurately measure an object parameter does not necessarily imply the ability to separate objects based on that parameter. For instance, with FSK, it is feasible to measure the distance of moving objects, but it is not possible to separate objects by distance only.
|
Separation vs. modulation
|
CW
|
FSK
|
FMCW sawtooth
|
FMCW triangle
|
FMCW fast chirp
|
|||
|---|---|---|---|---|---|---|---|---|
|
Velocity (Speed and direction)
|
|
|
|
|
|
|||
|
Distance of moving objects
|
|
|
|
|
|
|||
|
Distance of static objects
|
|
|
|
|
|
|||
Number of antennas vs. object separation
Basic radar devices operate with one transmitting (TX) and one receiving antenna (RX), typically employing one of the modulations mentioned earlier. Using two RX antennas allows the measurement of an object’s angle of arrival, either horizontally or vertically based on the arrangement.
In contrast, more sophisticated radar sensors utilize multiple TX and RX antennas, employing MIMO (Multiple Input, Multiple Output) technology to create virtual antenna arrays. This approach offers the advantage of not only measuring the angle of arrival but also enabling the separation of objects based on their angles.
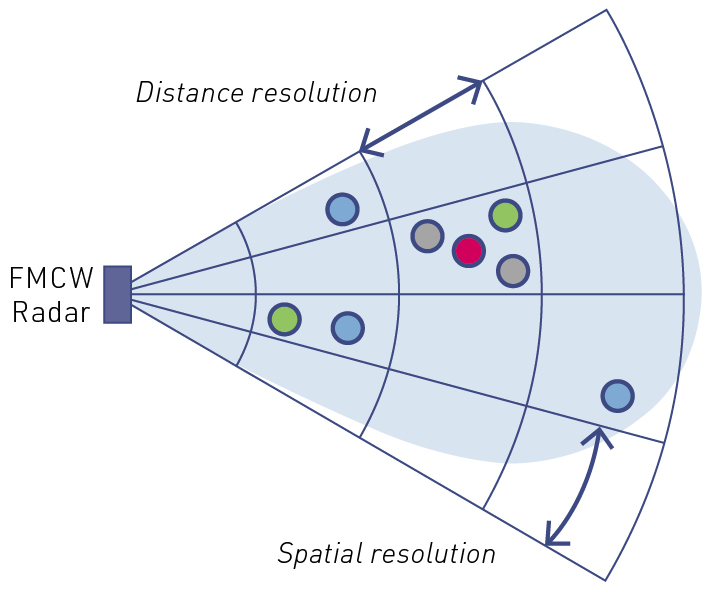
Separating objects by their angles requires a minimum of three virtual antennas along one axis. With three antennas, it becomes possible to divide the associated plane into two sectors, facilitating the separation of objects based on their angles. The greater the number of antennas per axis, the higher the spatial resolution, enhancing the capability to separate objects effectively.
Separation capabilites of digital RFbeam sensors
RFbeam offers a variety of digital radar sensors in its portfolio, each equipped with distinct modulation schemes and signal processing capabilities. This chapter aims to provide an overview of these sensors, detailing their measurement features and capabilities for object separation.
|
CW 1D Radar
|
|
|||
|---|---|---|---|---|
|
Product example
|
K-LD2
|
|||
|
Modulation
|
CW
|
|||
|
Number of antennas
|
1TX/1RX
|
|||
|
Measurement
|
Velocity
|
|||
|
Object separation
|
Velocity
|
|||
The K-LD2 is a typical Doppler radar designed for detecting moving objects and measuring their speed and direction. However, accurately localizing an object with this sensor poses a challenge. While it’s feasible to filter out objects based on their reflected magnitude to establish a distance threshold, this method is effective primarily for objects with similar reflectivity. Notably, the sensor may encounter limitations when distinguishing between objects with varying reflectivity; for instance, a car, reflecting considerably more energy than a person, will be detected at a greater distance compared to a person.
|
FSK 2D Radar
|
|
|||
|---|---|---|---|---|
|
Product example
|
K-LD7/K-MD7
|
|||
|
Modulation
|
FSK
|
|||
|
Number of antennas
|
1TX/2RX
|
|||
|
Measurement
|
Velocity
Distance 1D Angle |
|||
|
Object separation
|
Velocity
|
|||
The K-LD7 and K-MD7 are using FSK modulation and feature two receiving channels in the azimuth plane, allowing for object localization by measuring both distance and angle. The primary distinction between the two sensors lies in the K-MD7’s ability to detect higher speeds and its extended detection range.
Both sensors are well-suited for distance-triggered movement detections with optional velocity measurement. However, it’s important to note that FSK modulation has its limitations – it can only detect moving objects and separate them based on their velocity. When the velocity difference between objects is smaller than the velocity resolution of the radar, distinguishing them becomes challenging, leading to inaccuracies in distance and angle measurements. Similarly, if the sensor itself is in motion, all static targets may appear with the same velocity what makes it unusable for such applications.
Example
Speed difference is lower than speed resolution or radar is moving

Attention
FSK radar faces limitations in separating objects with identical speeds, resulting in incorrect distance and angle measurements.
-
 Objects with identical speed v1
Objects with identical speed v1 -
 Incorrect measurement because objects are inseparable
Incorrect measurement because objects are inseparable -
 Single object with speed v2
Single object with speed v2
|
FMCW 1D Radar
|
|
|||
|---|---|---|---|---|
|
Product example
|
V-LD1
|
|||
|
Modulation
|
FMCW sawtooth
|
|||
|
Number of antennas
|
1TX/1RX
|
|||
|
Measurement
|
Distance
|
|||
|
Object separation
|
Distance
|
|||
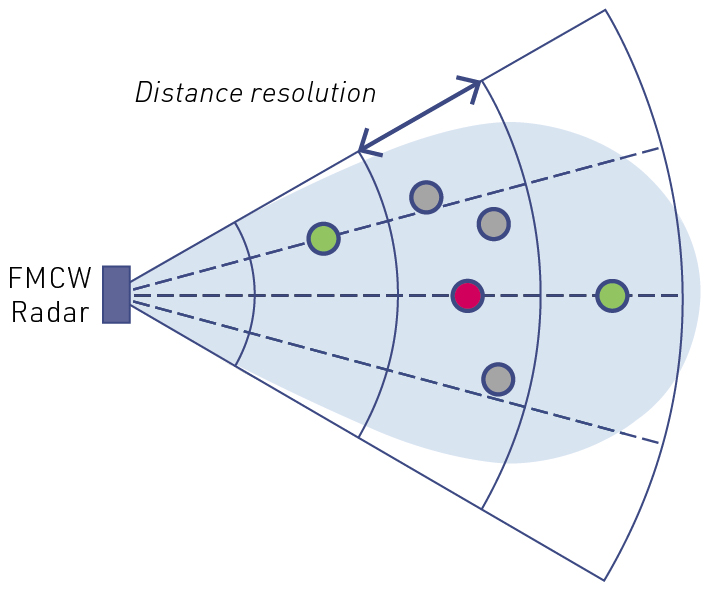
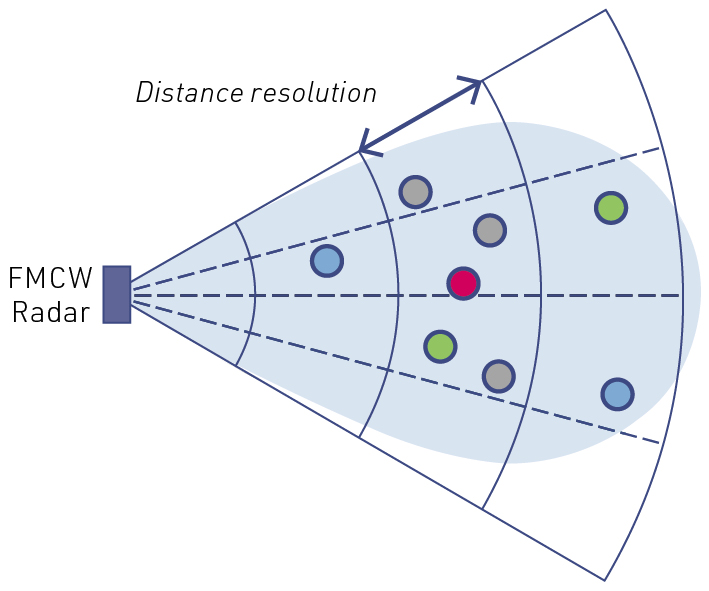
The V-LD1 works with an FMCW triangle modulation and can measure the distance of static objects. The distance resolution of an FMCW radar depends on the used bandwidth for the frequency ramp and gets better for higher bandwidths. This means that it is possible to separate objects from each other as long as the distance difference is greater than the distance resolution of the radar.
While the V-LD1 can measure the distance to objects and separate them based on distance, it lacks the capability to measure or separate by velocity or angle. In scenarios where static or moving objects within the antenna beam exhibit a distance difference smaller than the radar’s resolution, the V-LD1 cannot effectively distinguish between them.
Example
Distance difference is lower than distance resolution
Attention
FMCW 1D radar cannot effectively separate objects by distance, Resulting in measurements that represent something in between.
-
Objects within distance resolution
-
Incorrect measurement because objects are inseparable
-
Objects separable by distance
|
FMCW 3D Radar
|
|
|||
|---|---|---|---|---|
|
Product example
|
K-MD2
|
|||
|
Modulation
|
FMCW fast chirp
|
|||
|
Number of antennas
|
1TX/3RX
|
|||
|
Measurement
|
Velocity
Distance 2D Angle |
|||
|
Object separation
|
Velocity
Distance |
|||

The K-MD2 employs fast FMCW triangle ramps for modulation, creating a range-Doppler map for object detection. This enables the separation of objects based on distance and velocity. While the 3 RX antennas facilitate angle of arrival measurement in the azimuth and elevation plane, the sensor is unable to separate objects based on angle as it utilizes only two antennas per angular plane.
Example
Distance and speed difference between objects is lower than distance and speed resolution
Attention
FMCW 3D radar cannot effectively separate objects by angle, resulting in measurements that represent something in between.
-
Objects with speed v1 within distance resolution
-
Incorrect measurement because objects are inseparable
-
 Objects with speed v1 but separable by distance
Objects with speed v1 but separable by distance
-
Objects with speed v2 separable by different speed
|
FMCW 3D MIMO Radar
|
|
|||
|---|---|---|---|---|
|
Product example
|
V-MD3
|
|||
|
Modulation
|
FMCW fast chirp
|
|||
|
Number of antennas
|
3TX/4RX
|
|||
|
Measurement
|
Velocity
Distance 2D Angle |
|||
|
Object separation
|
Velocity
Distance 1D Angle |
|||

The V-MD3 employs the same FMCW fast chirp modulation as the K-MD2, enabling the separation of objects based on speed and range resolution. Additionally, it operates with multiple transmit and receive channels in a MIMO configuration. The virtual antenna pattern utilized provides a total of 8 antennas in the azimuth plane and 2 antennas in the elevation plane. With more than two antennas in the azimuth plane, the radar can also effectively separate objects based on their angle. Objects with an angle difference greater than the spatial resolution of the radar can be distinguished from each other.
Example
Distance, speed and horizontal angle difference between objects is lower than distance, speed and spatial resolution
Attention
FMCW 3D MIMO radar cannot effectively separate objects, resulting in measurements that represent something in between.
-
Objects with speed v1 within distance and spatial resolution
-
Incorrect measurement because objects are inseparable
-
Objects with speed v1 but separable by distance or angle
-
Objects with speed v2 separable by different speed
Conclusion
In conclusion, understanding radar resolution is crucial for comprehending radar system capabilities. Radar resolution, different from measurement accuracy, underscores a radar’s ability to distinguish objects from each other, while measurement accuracy centers on the precision of the measured data itself.
Modern radar systems, equipped with advanced modulation and multiple transmit/receive channels, not only measure these parameters but also facilitate object separation based on velocity, distance, and angle. Combined with radar’s environmental robustness, this ensures effective use even in challenging conditions.
Looking ahead, the number of antennas, their arrangement, and advanced algorithms will be pivotal in enhancing radar resolution for a clearer picture of surroundings. Furthermore, evolving modulation schemes, including new digital ones, hold the promise of designing more robust radar systems in the future.
Thank you for reading, and stay tuned for exciting updates from RFbeam in 2024.